Verlässliche Höheninformationen sind essentiell um eine MTB-Runde aus konditioneller und technischer Sicht bewerten zu können. Gefahrene Geschwindigkeit, Belastungsintensität, Fahrzeit aber auch Fahrspaß hängen maßgeblich von den Steigungen und Gefällen ab. Bewältigte Höhenmeter und Kalorienverbrauch sind wichtiger Bestandteil jeder Auswertung.
In einer Beitragsreihe möchte ich verschiedene Aspekte beleuchten, die vielleicht hilfreich sind um die Höheninformationen die euch ein GPS Gerät, eine Navigationsapp oder eine Auswertung anzeigen, beurteilen zu können. Beginnen möchte ich mit ein paar Anmerkungen zu digitalen Höhenmodellen.
Quellen für Höheninformationen
Es gibt im wesentlichen 3 praktisch relevante Quellen für die Höheninformationen die euch im MTB Alltag begegnen:
- Zahlreiche GPS-Geräte (und einige wenige Smartphones) besitzen einen eingebauten barometrischen Höhenmesser, der die aktuelle Höhe anhand des Luftdrucks bestimmt. Diese Methode kann Höhenänderungen sehr gut messen. Um die absolute Höhe richtig wiederzugeben muss der Höhenmesser allerdings an Punkten mit bekannter Höhe kalibriert werden. Weiterhin sind bei der Interpretation der gemessenen Höhen externe Einflüsse zu berücksichtigen, insbesondere Luftdruck- und Temperaturschwankungen aufgrund von Wetteränderungen oder eine eventuelle Beeinträchtigung des Sensors durch Nässe und Schmutz.
- Aus den Signalen der GPS-Satelliten kann neben der Position im Prinzip auch die Höhe ermittelt werden. Allerdings ist die Genauigkeit dieser dritten Dimension systembedingt um etwa eine Größenordnung schlechter als die der Ortskoordinaten. Zudem ist die Höhenmessung auf schlechte Empfangsbedingungen (zu wenige sichtbare GPS-Satelliten, ungünstige Satellitenkonstellation, …) deutlich anfälliger, was zu sprunghaften Änderungen in den gemessenen Höhen führen kann. Die Höhenbestimmung über GPS ist daher lediglich für eine grobe Bestimmung der absoluten Höhe unter guten Bedingungen geeignet, nicht aber zum Aufzeichnen von detaillierten Höhenprofilen. Mangels Alternativen wird diese Methode in der Regel die von Geräten ohne barometrische Höhenmessung und Navigations-Apps verwendete Quelle sein. In einem späteren Blogbeitrag werde ich vielleicht diese Art der Höhenbestimmung noch näher betrachten.
- Zu guter Letzt gibt es noch die digitalen Höhenmodelle, um die es in diesem Beitrag gehen soll. Bei ihnen sind die Höhendaten in einer großen Datenbank hinterlegt. Aus dieser werden die Höhen zu den aufgezeichneten Track-Koordinaten ermittelt und dem Track hinzugefügt. Dies geschieht meist erst im Nachhinein wenn man einen gefahrenen Track in ein Portal hochlädt. Bezüglich dieser Höhenmodelle gibt es einiges zu beachten, was ich im folgenden kurz erläutern möchte.
Die digitalen Höhenmodelle SRTM und ASTER
Es gibt zahlreiche digitale Höhenmodelle, etwa von Vermessungsämtern, die allerdings meist nur eine begrenzte Region abdecken und in unterschiedlichen Referenzsystemen vorliegen. Von besonderer Bedeutung sind daher zwei Höhenmodelle die (mit Ausnahme der Polregionen) eine globale Abdeckung besitzen:
- Dei Daten zum SRTM (Shuttle Radar Topography Mission) Modell wurden 2000 während einer Space Shuttle Mission mittels Radarmessung aus dem Weltall ermittelt. Sie liegen in einem Raster von 90x90m oder 30x30m vor. Aufgrund der verwendeten Messmethode geben die Höhendaten die Oberflächenstruktur inklusive Bewuchs und Bebauung wieder.
- Für das Höhenmodell ASTER wurden stereoskopische Aufnahmen vom Erdbeobachtungssatelliten Terra ausgewertet. In dem man die gleiche Stelle aus unterschiedlichen Blickwinkel aufnimmt kann aus diesen Aufnahme die Höhe zurück berechnet werden. Die Auflösung beträgt ca. 30m. Auch
Es gibt wissenschaftliche Untersuchungen und Vergleiche der Genauigkeit (z. B. Loudi Yap et al). Aus diesen lässt sich jedoch nur schwer ablesen welche praktischen Folgen sich aus der Verwendung eines digitalen Höhenmodelles ergeben. Ich möchte daher die Betrachtung pragmatisch anhand eines repräsentativen Areals bei mir in der Nähe führen.
Als Referenz nutze ich dazu das offizielle Modell DGM 1 des Bayerischen Vermessungsamtes. Es wurde von Flugzeugen aus mittels LIDAR Methode gemessen, welche die tatsächliche Bodenstruktur wiedergebt. Die hohe Genauigkeit ist bereits in der Relief-Darstellung deutlich erkennbar, da man z. B. die Verläufe einzelner Wege klar erkennt. Die Höhengenauigkeit wird mit ± 0,2 m angegeben. Die Höhendaten liegen in einem Raster von 1x1m vor.
Das Testgebiet
Bei dem Testgebiet handelt es sich um einen ca. 400m x 400 m grosses Arreal (blauer Kasten) rund um einen Hochbehälter im Fürther Stadtwald, welcher in Form zweier rechteckiger Plateaus in der Reliefdarstellung erkennbar ist.

Westlich davon fällt das Gelände relativ steil ab und führt in zwei Geländeeinschnitten Richtung Norden, wo sich auch Reste mittelalterlicher Steinbrüche finden. Diese sind als Abbruchkanten gut sichtbar. In diesem Bereich finden sich einige schöne MTB Abfahrten. Richtung Osten und Norden fällt das Gelände ebenfalls deutlich aber weniger steil ab.
Vergleich SRTM-Höhenmodell zu Referenzmodell
Im folgenden Bild sind die Höhendaten aus dem SRTM-Modell (links) und aus dem LIDAR-Referenzmodell (Mitte) nebeneinandergestellt. Die Höhendaten sind im 90×90 m Raster der SRTM-Daten ermittelt, so dass keine Interpolation notwendig ist. Im rechten Bild ist die Differenz der Daten angezeigt und in Abhängigkeit der Differenz farblich eingefärbt.

Die geringste Abweichung von 1,7 m findet man im Bereich des Hochbehälters (weiss). Dass entspricht der Erwartung dass dies die einzige Fläche ohne Bewuchs ist und die Oberflächenmessung aus SRTM das beste Ergebnis liefern sollte. Interessanterweise ist dieser Punkt im Referenzmodell auch der höchste, was auch der Realität entspricht. Im SRTM-Modell gibt es jedoch im umgebenden Wald zahlreiche mit grösseren Höhen. Dies spiegelt sich auch im rechten Bild wieder, wo die Unterschiede typischerweise 10m und mehr betragen sobald Bewaldung vorhanden ist. Auch wenn es schwierig ist die reale Höhe der Bäume abzuschätzen und vorherzusagen wie die SRTM-Messmethode über die Baumkronen mitteln wird ist dies ein typischer Wert, den man oft findet wenn man Höhen aus dem SRTM-Modell über Baumgrenzen hinweg ermittelt.
Auffällig ist ebenfalls dass die Höhendaten im SRTM-Modell weniger stark variieren als im LIDAR-Referenzmodell. Im erweiterten Ausschnitt sieht man dass so schnell Differenzen von 25m und mehr (rot markiert) entstehen.

Es ist also so dass die SRTM-Höhen nicht einfach der Bodenstruktur plus einem konstanten Offset für die Bewaldung folgen. Vielmehr ist das Relief deutlich verwaschener und gibt das tatsächliche Relief nur sehr grob wieder. Man kann sich das so erklären dass mittels der SRTM-Methode nicht die Höhe an genau einem Punkt, sondern ein Mittelwert über einen Bereich um diesen Punkt herum gemessen wird. Das erkennt man an den beiden Stellen mit rot markierten Höhenpunkten besonders gut.
Im rechten Bereich fällt das Gelände auf etwa 300 m um ca. 30 m in eine breite Senke ab. In den SRTM-Daten findet man nur etwa die Hälfte dieser Höhendifferenz. Die Auflösung ist also scheinbar so grob dass in die SRTM-Höhe die höheren Bereiche der Umgebung mit einfließen. Oben links findet man eine Abweichung ähnlicher Größenordnung. Hier befindet sich in der Realität gar keine Senke. Vielmehr scheint sich die leichte Anhöhe, die nordwestlich liegt, auf die gemessenen Werte auszumessen. Insgesamt lässt sich aus den Beobachtungen abschätzen dass die gemessene Reliefauflösung noch gröber ist als die reine Rasterweite der Daten (im Beispiel 90 m).
In der Praxis kommt eine weitere Unsicherheitsquelle hinzu. Da die Höhendaten in einem Raster vorliegen muss man zur Bestimmung der Höhe an einer bestimmten Stelle immer eine Interpolation vornehmen, also aus den Werten der in der Nähe liegenden Rasterpunkte einen Zwischenwert errechnen. Das Problem ist nun dass eine reale Bodenstruktur sich nicht einfach über lineare oder quadratische Formeln abbilden lässt. Verwendet man für die Interpolation jedoch Formeln höherer Ordnung so muss man zwangsweise weiter entfernter liegende Messpunkte mit einbeziehen, von denen man weiß dass sie immer weniger Aussage über den eigentlich interessierenden Punkt erlauben. In Summe kann man also festhalten dass man selbst wenn man ein Raster verlässlicher Höhenmessungen hätte die Bestimmung der Höhen an beliebigen Punkten nicht mit der gleichen Genauigkeit möglich ist.
Als Zwischenfazit kann man also drei Schwachstellen des digitalen Höhenmodells SRTM festhalten:
- der Einfluss von Bewuchs und Bebauung
- sehr grobe Reliefauflösung
- Fehler durch Interpolation
Praxistest Nr. 1: Höhenverlauf am Main-Donau-Kanal
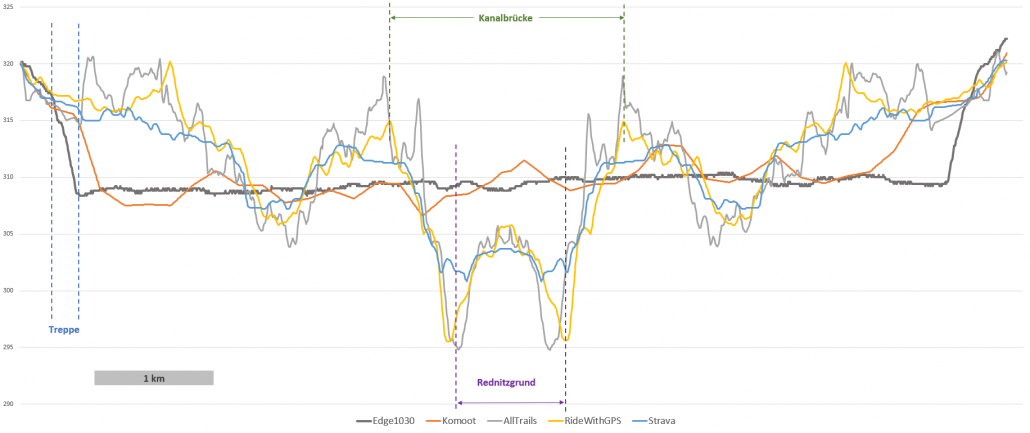
Für den ersten Praxistest nutze ich den nahezu perfekt ebenen Weg am Main-Donau-Kanal bei Fürth, den ich auf einer Länge von ca. 3,5 km in beide Richtungen abgefahren bin. Die interessanten Stellen sind in der Übersichtskarte gut erkennbar:

- die Aufzeichnung beginnt und endet mit einer Treppe (links oben im Bild), deren Höhenunterschied etwa 10 m beträgt. Dies ist der einzige relevante Höhenunterschied während der Testfahrt. Diese Stelle sollte im Höhenprofil als kurzer, steiler Ab- und Anstieg erkennbar sein.
- nach etwa 2,5 km nähert man sich der etwa 300 m langen Kanalbrücke, die den darunterliegenden Rednitzgrund in einer geschätzten Höhe von 15m überquert. Diese Stelle ist der Prüfstein, an dem man zuverlässig erkennen kann ob eine Messung auf digitalen Höhenmodellen basiert. Ist dies der Fall wird die Höhe über einen Bereich gemittelt, der Teile der Brücke aber auch der darunterliegenden Wiese umfasst, und somit zwangsläufig zu tief ermittelt. Im Ergebnis wird das Höhenprofil eine künstliche Senke aufweisen.
- im Verlauf der Testfahrt unterquert man eine Reihe von Strassenbrücken. Hier ist der umgekehrte Effekt zu erwarten: in über digitale Höhenmodelle ermittelte Werte sollte diese zum Teil mit eingerechnet sein und somit zu hoch ausgewiesen. Solche Stellen würden als virtuelle Anstiege erkennbar sein.
- Ansonsten ist das Terrain uneinheitlich. Auf der einen Seite liegt der etwa 40 m breite Kanal konstant geschätzte 3-4 m unterhalb des Radweges. Auf der anderen Seite befindet sich im oberen Drittel ein Abhang von zu Beginn ca. 15 m Höhe. Die Höhendifferenz wird kontinuierlich kleiner bis auf Höhe von Eschenau der Radweg etwa auf Höhe der Umgebung und sogar leicht darüber ist. Etwa auf Höhe der unterquerten Bahnbrücke rückt die Bewaldung wieder näher heran. Auf der anderen Seite der Kanalbrücke ist der Radweg wiederum leicht erhöht gegenüber der Umgebung.
Diese Teststrecke habe ich parallel mit einer Reihe von Smartphone-Apps aufgezeichnet, bei denen ich die Verwendung digitaler Höhenmodelle vermutete. Dies sind:
- Komoot (orange)
- AllTrails (Gpsies-Nachfolger) (hellgrau)
- Strava (blau)
- RideWithGPS (gelb)
- als Referenz dient ein Garmin Edge 1030 mit barometrischer Höhenmessung (dunkelgrau).

In der Darstellung sind die gemessenen Höhen über der Zeit gezeigt. Die horizontalen Linien haben einen Abstand von 5 Höhenmetern. Da Aufzeichnungen mit bikemap und outdooractive nicht mit Zeitstempel exportierbar sind konnte ich sie nicht in die Auswertung einbeziehen.
- Entsprechend der Erwartung ergibt sich für den Edge 1030 ein fast ebener Verlauf entlang des Kanalwegs. Die langsame Schwankung von ± 2 m zeigt dass auch die barometrische Messung eine gewisse Ungenauigkeit mit sich bringt. Ebenfalls gut zu erkennen sind die An- und Aufsteige an der Treppe zu Beginn und am Ende des Tests.
- Die Messungen mit AllTrails, RideWithGPS und Strava zeigen eine deutlich geringere Höhe im Bereich der Kanalbrücke mit einem Minimum im Bereich der Rednitzquerung. Dies lässt den Schluss zu dass diese Apps mit digitalen Höhenmodellen arbeiten. Auch der fast perfekt symmetrische Verlauf bei Hin- und Rückfahrt ist ein starkes Indiz hierfür. Es gibt zahlreiche ausgeprägte Strukturen, die sich bis in Details wiederholen.
- In der Nähe von Brücken und Anhöhen hingegen weisen diese Apps tendenziell höhere Werte aus, da wo die Umgebung niedriger als der Radweg liegt dagegen dagegen niedrigere (Nähe Eschenau bei 2 km und nach der Kanalbrücke in der Mitte der Darstellung). All das lässt sich mit den Eigenheiten der digitalen Höhenmodelle in Einklang bringen.
- Im Gegensatz dazu lässt sich das mit der Komoot App aufgezeignete Profil nicht mit digitalen Höhenmodellen im Einklang bringen. Es fehlt die charakteristischen Senken und Anstiege an den zu erwartenden Stellen und die Aufzeichnung ist nicht symmetrisch. Mein Verdacht ist dass diese App die GPS-Höhe verwendet, was ich allerdings nicht belegen kann.
Die drei per Höhenmodell erzeugten Profile schauen im Detail doch sehr unterschiedlich aus. Das zeigt deutlich dass in der Auswertung der digitalen Höhenmodelle noch viel zusätzlicher Spielraum liegt. Vielleicht nutzen die einzelnen Apps verschiedene Modelle, mit Sicherheit werden sich aber die verwendeten Algorithmen zur Auswertung (z. B. unterschiedliche Abstände der Stützstellen), Interpolation und Glättung von Daten unterscheiden. Wichtig ist dass diese Nachbearbeitung keines der systembedingten Defizite der digitalen Höhenmodelle kompensieren, sondern im besten Fall lediglich keine weiteren Ungenauigkeiten erzeugen kann.
Bei der Betrachtung der Profile stellt sich zwangsläufig die Frage wie viele Höhenmeter daraus ermittelt würden. Würde jede Schwankung und jeder Zacken aufsummiert ist offensichtlich dass ein erheblicher Wert zustande käme (zur Erinnerung: der reale Wert ist nahe 0 Höhenmeter). Aber auch bei starker Glättung würde jede Messung ein anderes Ergebnis liefern. Dieses Thema zu beleuchten würde diesen (bereits sehr langen) Blog sprengen, daher werde ich diese Aspekt in einem späteren Beitrag betrachten.
Praxistest Nr. 2: offenes Gelände
Nachdem der ersten Test gezielt eine Strecke gewählt wurde bei der die Probleme der digitalen Höhenmodelle zu Tage treten möchte ich im zweiten Tests das Umgekehrte versuchen. Nach dem Gesagten sollten digitale Höhenmodelle das beste Ergebnis liefern
- in offenem Gelände, insbesondere ohne Bewuchs, Bewaldung oder Bebauung
- in annähernd flachem Gelände (d. h. die Geländestrukturen sollten deutlich weitläufiger sein als die Rasterabstände der Höhenmodelle)
Ich habe im Rahmen meiner örtlichen Möglichkeiten daher eine Runde zusammengestellt, die so weit wie möglich über offene, abgeerntete Felder führt. Ganz vermeiden konnte ich Anstiege, kurze Waldstücke und Ortschaften nicht, aber sie bieten natürlich wiederum die Gelegenheit diese Stellen genauer anzuschauen. Sie sind daher mit 1 bis 5 markiert.

Gemessen wurde wieder mit den oben genannten Apps. Die Messungen wurden auf den gleichen Werte am Startpunkt kalibriert und diesmal die Abweichung von der Edge1030-Messung dargestellt. In der Darstellung fehlt die Alltrails-Messung, da sie aufgrund des großen Signalrauschens die Lesbarkeit stark beeinträchtigt hätte. Im Einzelnen sind dargestellt:
- Komoot (blau)
- RideWithGPS (orange)
- Strava (hellgrau)
- Garmin Edge 1030 (Nullinie)

Es fällt auf dass über den größten Teil der Teststrecke die Höhen sehr nahe beieinander liegen (die horizontalen Linien entsprechen 10 Höhenmeter), egal ob sie aus barometrischer Messung (Edge 1030), digitalem Modell (Strava, RideWithGPS) oder unbekannter Quelle (Komoot) stammen. Die wenigen Stellen an denen die digitalen Höhenmodellen Abweichungen von 10 m erreichen lassen sich ausnahmslos auf örtliche Eigenheiten wie Bewaldung (1, 3, teilweise 4 und 5) oder starker Bodenkontur (1, 2, 4). Also genau dort wo man Ungenauigkeiten erwartet kann.
Das Ergebnis der Komoot-Messung lässt sich aufgrund der Unklarheit über die Datenquelle nicht wirklich interpretieren. Dass der große Höhenunterschied zu Beginn (Punkt 1) entgegengesetzt des Ausschlags der auf digitalen Höhenmodell basierenden Messungen ist lässt aber schon vermuten dass tatsächlich eine grundsätzlich Methode verwendet wird.
Fazit
Höheninformationen die aus digitalen Höhenmodellen stammen sind mit Vorsicht zu genießen. Es gibt Situationen in denen sie für die absolute Höhe gute Ergebnisse liefern:
- in freiem Gelände, also ohne Bewuchs, Bebauung und Wald
- wenn die Geländestrukturen weiträumig (100 m und größer) und gleichförmig sind
Diese Voraussetzungen werden allerdings für die wenigsten MTB relevanten Strecken gegeben sein. Tatsächlich zeigt die Untersuchung dass schnell Fehler in der absoluten Höhe von 10 m und mehr auftreten, einerseits kleinteiligere Bodenstrukturen nicht wiedergegeben werden, aber andererseits bei flachen Strecken signifikante Höhenänderungen angezeigt werden die es in der Realität nicht gibt.
Es ist zu bezweifeln dass auf dieser Basis Kennzahlen wie Höhenmeter, Steigungen oder Kalorienverbrauch verlässlich ermittelt werden können. Ich möchte hier aber nicht vorgreifen, sondern dieses Thema in einem separaten Beitrag genauer betrachten.


Hinterlasse ein Kommentar
An der Diskussion beteiligen?Hinterlasse uns deinen Kommentar!